

تا به امروز تجهيزات بدون سرنشين توانستهاند به عنوان بخشي از ارتش کشورهاي دنيا در قالب بالون، فريبدهندهها و غيره، ايفاي نقش کنند. در اواسط دههي هشتاد ميلادي برنامهاي به نام سيستم بدون سرنشين هوابرد رهگيري و شناسايي اهداف (UASTAS - 1988) و پرندههاي کنترل از راه دور (WEILER-et al-1986) به رشد فعاليتهاي تحقيقاتي که بر روي وسايل بدون سرنشين در کانادا در حال انجام بودند، کمک زيادي نمود. با اين شروع، واضح و روشن است که عوامل انساني ( HF) را ميبايست بخشي از طراحي سيستم بدون سرنشين در نظر گرفت (GRODSKI - 1993) و نبايد به صورت سَرسَري از کنار اين مبحث عبور نمود.
به طور ذاتي، عوامل انساني خود به خود درگير سيستمهاي بدون سرنشين هستند. اين عوامل فرض سادهاي از موضوعات و مسايل انساني مؤثر در سيستم زندگي بشري ميباشد. عوامل انساني، به تماميجهاتِ سيستم که شامل توسعه، طراحي، تست و ارزيابي سازمان و فرايند، تعمير و نگهداري و مصرف آن ميباشد، اشاره ميکند. اين واژه (HF) شامل موارد زير است (البته تنها محدود به اين مفاهيم زير هم نخواهد بود):
• بهره وري (در دستيابي به هدف).
• کارآيي (آگاهي از وضعيت، تصميم گيري، بررسي و تحليل کار).
• فشار و حجم کاري.
• روابط و تعاملات بين تجهيزات و انسان (طراحي رابط کاربر).
• تعاملات بين انسان - انسان (گروهها، فرهنگها، همکاري مشترک).
• آرگونوميک (طراحي محل کار).
• ايمني.
• نيروي انساني (منابع انساني).
• آموزش.
کاربرد اين موضوعات و حوزهي آنها در سيستمهاي بدون سرنشين به خودي خود بحث جديدي نيست اما تحليل عوامل انساني، ميبايست براي تضمين سيستمهاي مؤثر و بهرهور با کارآيي بالا، انجام گيرند.

چرا تصاوير و اشکال مربوط به عوامل انساني آنقدر در طراحي و عملکرد سيستمهاي بدون سرنشين خودنمايي ميکنند؟ در طول ده سال گذشته، عملکرد يک وسيلهي بدون سرنشين به صورت ثابت باقي مانده است، يعني به صورت چند کاربر براي هر دستگاه و کاربر هم متقابلاً کنترل کامل وسيله، هدايت و عملکرد سنسورها و نيز تفسير اطلاعات را بر عهده دارد. طراحان وسايل نقليهي سطحي (زمين و دريا) و کم ارتفاع ميبايست از برخورد و تصادفات جلوگيري کرده و اين کاربران انساني بوده که هنوز هم داراي بهترين مهارتها و الگوريتمها براي هدايت موفق وسيله در طي عبور از موانع موجود در مسير ميباشند. بنابراين وسايل بدون سرنشين عملياتي، مجبورند که نيروهاي انساني را به عنوان اجزاي اصلي سيستم حفظ نمايند. بنابراين نيازمند جدي بررسي و تحليل عوامل انساني در حوزههاي کاري خود ميباشند.
نرمافزارهاي هوشمند (هوش مصنوعي) در قالب پروژههاي تحقيق و توسعه، از اواخر دههي 90 تا کنون به طور مستمر کاربرد داشتهاند، نظير برنامهي کمک خلباني AFRL ، برنامهي شناسايي کابين DERA، برنامهي افزايش آگاهي DARPA و برنامهي رابط کاربري هوشمند Toronto-DRDC). قابليتها و کاربرد الگوريتمهاي هوش مصنوعي و سيستمهاي هوشمند براي وسايل بدون سرنشين، منجر به تغيير تفکر حاکم بر آيندهي اين پرنده ها شده است. مخصوصاً عوامل هوشمند اين فرصت را به طراحان ميدهند که بتوانند به ماشين مورد نظر فرصت بازيابي، هدايت و بسياري مأموريتهاي کنترلي مأموريت را بدهند که در اين صورت باعث کاهش بار کاري اپراتور و افزايش کارآيي کلي سيستم ميگردند.
اين نوع هوشمندي و نيز خلبان خودکار انطباقي، راه و مسير خود را به سرعت در بين سيستمهاي پهپادي مداوم پرواز ارتفاع متوسط يافته و توانسته تکنولوژي مربوط به هواپيماهاي تجاري در رابطه با نشست و برخاست خودکار و هدايت نقطه به نقطه را به کار گيرد. همچنين وسايل زير سطحي (زير آبي) بدون سرنشين UUV به خاطر مشکلاتي که ممکن است در داشتن خطوط مخابراتي ايمن و بلادرنگ با وسيله داشته باشند، مجبورند به صورت کاملاً اتوماتيک باشند. بين ماشيني که کاملاً اتوماتيک است و ماشيني که کاملاً مستقل است يک اختلافي وجود دارد. اتوماتيک به اين معني است که تماميوروديها شناخته شدهاند و هر حرکتي از قبل برنامهريزي شده است و نياز به هيچ آگاهي يا تطابق براي يک ماشين اتوماتيک در محيطهاي شناخته شده نيست. اما بحث مستقل بودن به معني خود گرداني و خود مختاري بوده و موقعي به کار ميرود که براي انجمنها و جوامع انساني (که مستقلاند) به کار ميرود. لغت Autonomy اشاره دارد به هوشمندي که توسط استرنبرگ (1996) تعريف شده و به معناي رفتار هدايتي به سمت هدف و يادگيري و تطابق در محيطهاي ناشناخته ميباشد. کلمهي Autonomy همچنين اشاره دارد به مفهومي از خود هدف و ارزش. تمامي مأموريتهاي UUV از قبل برنامهريزي شدهاند (مشابه وسايل و روبوتهاي فضايي). برنامهها و فعاليتهاي جايابي و مکانيابي مجدد براي يک ماشين، تعيينکنندهي چگونگي اينکه عوامل انساني در مورد يک سيستم بدون سرنشين به کار ميرود ميباشد. به جاي کاربر کنترلي مستقيم (مثل دسته فرمان، دستهي گاز و پدال)، براي کنترلهاي نظارتي يک واسطهي کاربري نياز بوده که مد نظر قرار گيرد (نظير DVI، نقشههاي متحرک و يک صفحهي لمسي ). بنابراين سيستمهاي آينده ممکن است نيازمند مسؤولين انساني، تنها براي درجات بالاتر کنترل و هدفيابي باشند و براي ديگر کاربردهاي سطح پايينتر، نظير حرکت و هدايت و بعضي از ارتباطات، جلوگيري از برخورد با موانع، الگوهاي جستجوي خودکار و شناسايي و تشخيص هدف بر عهدهي خود ماشين باشد. از منظر يک عامل انساني، انسان از جايگاه فعلي خود يعني کنترل و هدايت مستقيم سيستم، به سمت جايگاه فرماندهي و نظارت تغيير مکان مييابد. با پيچيدهتر شدن الگوريتمهاي هوشمند، طراحان ميتوانند کارهاي پيچيدهتر و دشوارتر را براي ماشين تعريف کرده و اين ماشينها ممکن است حتي بتوانند تصميمات پيچيدهتر و سطح بالاتري را هم بگيرند، البته با درجهاي از عدم قطعيت؛ مخصوصاً اگر الگوريتمهاي مربوطه مبتني بر منطق فازي باشد. انسانها احتياج دارند که هميشه به دستگاه خود اعتماد و ايمان داشته باشند يا در رابطه با تصميمات گرفته شده توسط ماشين و روند انجام يک فرآيند، درجهي بالاتري از اطمينان را داشته باشند. روابط متقابل بين ماشين و انسان بيشتر شبيه يک رقيب شرکتي و تجاري خواهد بود تا اينکه شبيه به يک رابطهي ارباب - رعيتي باشد. انسانها پيش از اين در بعضي از حوزهها نظير واگذاري تصميمِ جابجاييِ ما از نقطهاي به نقطهي ديگر به ماشينها اعتماد داشتند، اما آيا ما آمادهايم که اين اعتماد را بيش از اين هم گسترش دهيم و نقطهاي که ماشين برايمان تصميم گرفته را بپذيريم؟ و يا اينکه چگونه سازمانهاي نظامي و دولتي از خودشان در برابر يک دشمني که از وسايل بدون سرنشين هوشمند و تطابق پذير استفاده ميکند، دفاع خواهد نمود؟ اين مقالهي کوتاه بخشي از عوامل انساني مرتبط با وسايل بدون سرنشين را مورد بحث و بررسي قرار ميدهد. همانند اينکه چگونه الگوريتمهاي هوشمند منجر به انتقاداتي در رابطه با تمرکز بر روي ابعاد نيروي انساني سنتي به بحثهاي فلسفيتر ميگردند.
بحث طراحي سيستم وارد حوزهي سيستم هاي بدون سرنشين ميگردد
امروزه روشهاي طراحي سيستم براي طراحي و ساخت سيستم هاي بدون سرنشين اعمال ميشود. يعني يک طراح سيستم ميبايست نيازهاي کاربردي و عملياتي خود را از يک سناريوي عملياتي مشترک تعيين کرده و سپس کارکردهاي متناسب را به ماشين يا انسان منتقل نمايد و در نهايت وظايف انساني و روشهاي کاري را تحليل و بررسي نمايد. طراحي فاکتورها و تحليل و بررسي عوامل انساني ميبايست تعيين کنند که آيا يک فرد قادر به انجام آن وظيفهي محوله ميباشد و يا اينکه تعداد افراد به کار گرفته شده و يا آموزشهاي مربوطه لازم هستند يا خير ؟ و يا اينکه آيا کارها يا عملکرد ديگري نياز است تا براي ماشين تعريف گردد يا خير ؟ با توجه به پيچيدگيهايي که عوامل و فاکتورهاي نيروي انساني بر روي روند طراحي ميگذارند، اغلب هيچ راه يکتا و منحصر به فردي در روند طراحي سيستمهاي بدون سرنشين وجود ندارد.

طرفدارن برنامهي CWA، ميبايست روند طراحي عمليات وسايل بدون سرنشين در يک محيط پيچيده را فرصتي مناسب و کاربردي براي روشهاي طراحي بدانند. طراحان برنامهي CWA، توانسته اند يک روند خلاصه و کوتاهي را ابداع کرده که ميتواند محدوديتها و موانع محيطي را بشناسد. با اين معلومات، طراحان ميتوانند به راحتي شرايط مرزي و اصول کلي عمليات وسيلهي بدون سرنشين را ترسيم نموده و در طراحي کلي سيستم اعمال نمايند. اگر چه فهم اين موضوع مشکل است، اما محدوديتها و موانعي را براي عملياتهاي نظاميايجاد خواهد کرد؛ چرا که ميدانهاي نبرد، اغلب بسيار گسترده بوده و داراي ابعاد سياسي، اقتصادي، اجتماعي، اطلاعاتي و نظامي و زيربنايي معروف به برنامهي (PMESП) ميباشند. مفهوم عاميانهاي به نام ارزيابي خالص عملياتي (ONA ) ميکوشد تا تمامي اطلاعات دروني و ديناميکي پيچيدهي PMESПرا در يک پايگاه دادهي منحصر به فرد و يکتايي جمع آوري کند. CWA ممکن است به يک ONA اعمال گردد تا نتيجهي آن يک سيستم بدون سرنشين مؤثر و کارآمدي گردد. موفقيت اين تحليل و بررسي به شدت بستگي به دقت زمانبندي ONA دارد. سيستمهاي بدون سرنشين کنوني و همچنين در آينده اي نزديک، به جاي روشهاي طراحي مبتني بر کلينگري نظير CWA يا طراحي عملياتي موردي سنتي، از مسير “Build a little- test a little استفاده خواهند کرد. اين روشها، مبتني بر رشد تکنولوژي همزمان سنسورها، رابط کاربري، مواد، محاسبات سريع، پهناي باند بزرگ و در نهايت هدايتپذيري عالي هستند. هدف کنوني جنگهاي اين دوره به خوبي کاربرد و اهميت سيستمهاي بدون سرنشين را نشان داده و به نمايش گذاردهاند و دولتها و ارتشهاي غربي شروع به تحليل و بررسي بر روي تمامي پتانسيل اين سيستمها نمودهاند (بيش از 30 سال است که کشور اسرائيل پرواز پهپادهاي عملياتي خود را شروع کرده و متوجه مزاياي استراتژيک و تاکتيکي اين تکنولوژي شده است). روشهاي طراحي سيستم ميتوانند براي بهينه کردن کارآيي سيستم همچنان به کار گرفته شوند. نهايتاً سيستمهاي بدون سرنشين در جايگاهي قرار خواهند گرفت که با مسيرهاي طراحي سيستم استاندارد، در موقعيتي معروف به “ the car has become before the horse “ قرار خواهند گرفت. اين امر با توجه به روشهاي استاندارد طراحي سيستم زير امکانپذير است چرا که سيستمهاي بدون سرنشين، نسبتاً ارزان و مناسب مأموريتهاي کند، خطرناک، کثيف و آلوده ميباشد. از سال 2001 تمايل به وسايل بدون سرنشين به طور اعجابانگيزي رشد کرده است. طراحان سيستم هم اکنون در تلاشند تا سناريوهاي مشترکي را تعريف نموده و طبق آن وظايف و کارهاي اپراتور را به طور سيستماتيک تعيين کنند. بنابراين رشد تکنولوژي (مخصوصاً در الگوريتمهاي هوشمند) بدين معناست که ميتوان وظايف جديد بسياري را به ماشين واگذار کرد. بنابراين طراحي سيستمهاي بدون سرنشين هنوز در مرحلهي رشد خود قرار دارند.
موضوعات مربوط به عوامل انساني کنوني
موضوعات درگير در عوامل انساني سنتي نظير طراحي رابط کاربر و بار کاري، بيشتر در آغاز هزارهي جديد مطرح گرديدند. براي مثال پهپادهاي MALE و HALE نيازمند کنترلهاي سنتي از نوع درون کابيني بودند که خود نيازمند وجود اپراتورهاي ماهر بوده و بار کاري آن مخصوصاً در طي عمليات نشست و برخواست، افزايش مييافت. سازندگان پهپاد مشغول استفاده از نرم افزارهاي هوشمند براي نشست و برخاست خودکار پرنده هايشان در نسل بعدي پهپادها هستند تا بواسطهي آن بتوانند مقداري از بار کاري اپراتور را کاهش دهند. همچنين هماهنگي و تجميع فعاليتهاي هوافضايي (از نظر ايمني) تبديل به موضوع اصلي طرح PLIX شده است. از اين رو راه حلهاي موجود براي موضوع هماهنگي و تجميع فعاليتهاي هوافضايي، روندي مرتب و منظمي نسبت به رشد تکنولوژي خود خواهد داشت. برنامهي PLIX نشان داده است که تماسهاي سطوح مختلف ميبايست به کمک يک پهپاد مداوم پرواز ارتفاع متوسط ( MALE) کشف، طبقهبندي و شناسايي شوند و به عنوان مثال اين اطلاعات ميبايست براي تقويت تصاوير دريايي شناسايي شده (RNP) و ديگر استفاده شوند. اين آزمايش شامل فرستادن دادههاي سنسور از پهپاد MALE به مرکز فرماندهي عمليات براي تقويت RNP ميباشد. RNP هاي به دست آمده با/و بدون حالت تقويت نشده توسط اطلاعات پهپاد مقايسه ميشوند. ثابت شده است که دادههاي سنسور پهپاد باعث اصلاح حدوداً ده برابر RNP ها شده است. علاوه بر مطالعهي RNP، برنامهي PLIX فرصتي بود براي جمعآوري دادههاي مربوط به عوامل نيروي انساني تا تأثير انسان را بر روي به کارگيري پهپاد در سيستم RNP باشد. مطالعهي ديگري به نام PLIX-HF مبتني بر تأثير عوامل انساني، توسط سازمان تحقيقات ناتو در دسامبر 2001 با نام معماري يکپارچهسازي پرندههاي سرنشيندار با پهپادها انجام شده است که در آن از پنج تن از اپراتورهاي پهپاد CF سؤال شده تا نظرشان را راجع به 9 عامل انساني شامل موارد زير بيان دارند:
آگاهي و دريافت، پردازش اطلاعات، مهارتهاي رفتاري، شرايط کاري، آموزش و راهنمايي، کار گروهي، سيستمهاي ايمني، بهره وري کار و خطاهاي انساني. بعضي از اين موارد داراي زير مجموعه هايي بودند که هر دويشان سؤالاتي مجزا براي پاسخ دادن داشتند که در مجموع تعدادشان به 196 سؤال ميرسيد. روشي برداري براي تحليل دو قطبي و دو گانه ( VILLENEUVE- & FARRELL 2004) بر روي اين مجموعه دادههاي عظيم، اعمال گرديد. همچنين اين روش، نظر گروههاي شرکتکنندهي خود را در رابطه با کارآمدي سيستمهاي بدون سرنشين با توجه به موضوعات مربوط به عوامل انساني مورد مطالعه قرار داد. شرکتکنندگان فوق نظرشان را با اعداد معناداري بين 1 تا 9 شمارهگذاري کردند که عدد 1 بيانگر ايمني بسيار پايين و عدد 9 بيانگر ايمني کامل بود. پاسخ به اين سؤالات، نقطهاي را بر روي بردار جواب چند بعدي به خود اختصاص ميداد و اين بردار با يک بردار مرجع که تمامي مقادير آن عدد 9 بودند مقايسه ميشد. بنابراين تصوير بردار جواب بر روي بردار ايده آل معياري بود از کارآيي و راندمان (براي درک و فهم بيشتر اين موضوع دست نوشته هاي آقاي FARRLEL را ببينيد. نقاط موجود در شکل زير بيانگر مقدار بردار پاسخ و فاصلهي زاويه اي آن از بردار ايده آل ميباشد. هر نقطه بيانگر تمامي جوابها به پرسشها، تحت آن موضوع خاص ميباشد).
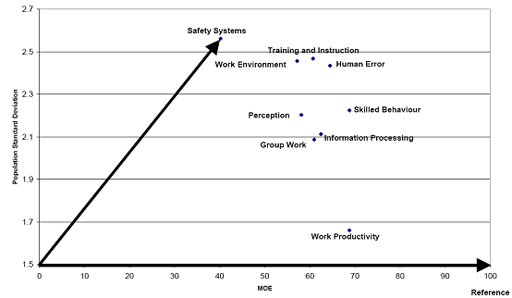
MOE هاي بدست آمده براي موضوعات مورد بررسي در بالا
پايينترين درجهي کارآيي سيستمهاي ايمني 40 درصد بوده در حالي که وضعيت ايده آل يعني هنگاميکه بيشترين و بهترين مقدار پروژه مورد نظر بوده، مقدار 68 درصدي را کسب نموده است. تمام داده ها بر روي 196 سؤال درهم ريخته شده تا يک رتبهي کلي به دست آيد که نهايتاً مقدار 67 درصد به دست آمده است. اين نتيجه بدين معني است که هنوز جاي زيادي براي اصلاح و تحقيق سيستمهاي بدون سرنشين PLIX از منظر عوامل انساني باقي مانده است.

از ديگر نتايج روشن که از PLIX ميتوان گرفت، نياز به جستجوي يک روش سيستماتيک براي تعيين تعداد خدمهي مورد نياز يک پهپاد ميباشد. اين تحقيق هم اکنون توسط CFEC و دانشکدهي روانشناسي سازماني/صنعتي دانشگاه انتاريوي غربي در حال رسيدگي است که منظور از آن تهيهي روش طراحي سيستم و مشخص کردن کارهاي لازم براي راه اندازي يک سيستم پهپادي و سپس مرتبط ساختن آنها با ديگر زير مجموعهها ميباشد. در عوض ليست کلي کارهاي متناسب با فعاليتهاي CF ميباشد که تصميمگير نهايي ميتواند تعداد خدمهي مورد نياز براي سيستم پهپاد را انتخاب و گزينش نمايد. توجه داشته باشيد که اين روش را ميتوان براي هر سيستم CF جديدي تعميم داد.
در سال 2001 گروه کاري ناتو ( TG - 078) شروع به تحقيقي با نام عوامل انساني مؤثر در افزايش قوا بر روي پرنده هاي بدون سرنشين نظامي(UMV ) نمود. اين نيرو مزايا و پتانسيل UMV ها را به دو دليل افزايش ميداد:
1- نسبت تعداد اپراتورهاي لازم براي وسيلهي بدون سرنشين به تعداد خود وسيله ها کاهش مييافت و 2- يک واحد کنترل و فرماندهي ميتوانست به تنهايي فرماندهي و/يا کنترل يک پهپاد مجزا را به همراه دادههاي سنسوري آن در دست گيرد. گروه کاري (TG) بر اين عقيدهاند که پروژهي افزايش نيرو و راندمان نيازمند تحقيق و توسعه در حوزههاي زير ميباشد:
• چارچوبهاي تئوريک.
• رابطهاي کاربري پيشرفته.
• کنترلهاي نظارتي و سرپرستي.
• درجات اتوماسيون.
• سيستماتيک کردن سيستمها.
چارچوبهاي تئوريک بيشتر بر روي شناسايي تئوريهاي مربوط به روابط متقابل انسان-ماشين و طراحي سيستميکه مخصوصاً قابل کاربرد در سيستمهاي بدون سرنشين ميباشد، متمرکز شدهاند. رابطهاي کاربري پيشرفته حوزهي تحقيقي بسيار پيچيدهايست، اما به محض آنکه تکنولوژي پهپادها دچار تغييرات سريعي شد، آنها نيز متناسباً رشد خواهند نمود. به احتمال زياد کنترل نظارتي يک چيز طبيعي و قانونمندي براي عملياتها خواهد شد، اما با افزايش کارهاي بر عهدهي ماشين گذاشته شده، روابط متقابل انسان - ماشين به جاي اينکه تبديل به رابطهي ارباب - رعيتي گردد، بسيار شبيه يک همکاري تيميخواهد شد و در نهايت به نظر ميرسد که کاربرد اعمال درجات اتوماسيون به سيستمهاي بدون سرنشين به بالاترين سطح خود برسد؛ يعني جايي که ماشين انسان را از وظيفهي مربوط به خود آگاه ميسازد. اما به علت پيچيدگيهاي PMESП، سيستماتيک کردن سيستمها دشوارترين فرايند ميباشد. به طور خلاصه موارد و موضوعات مربوط به عوامل انساني شامل طراحي رابط کاربر، بارِ کاري، سيستمهاي ايمني، انتخاب خدمه، درجات اتوماسيون و سيستماتيک نمودن سيستمها ميباشد.
نقش عوامل نيروي انساني در آينده
حجم اطلاعاتي که سنسورهاي وسايل بدون سرنشين جمع آوري نموده و براي اپراتور ارسال ميکنند، به صورت متنوعي ميباشد. در تحقيقات جديد ALIX ، امکان ارسال تصاوير ويدئويي مستقيم فراهم گرديده، اما به خاطر مسائل هزينهاي و نيز براي کاهش تداخل و سرريزي اطلاعات (و به دنبال آن کاهش حواس پرتي اپراتور) مجبور به ارسال کليپهاي کوچک ويدئويي و تصاوير لحظهاي شدند. الگوريتمهاي خودکار شناسايي، طبقهبندي، مکانيابي و تعقيب هدف ميتوانند فشار کار و يکنواختي وظايف اپراتورهاي انساني را کاهش داده و دادههاي سنسور را هم بررسي نمايند و حتي در بعضي شرايط بتوانند سرعت تشخيص آنها را هم اصلاح کنند. رابطهاي کاربري هوشمند تطابقي (IAI ) نسل بعدي الگوريتمهاي کامپيوتري بوده که با شناخت محيط و شرايط اپراتور، آگاهي از اهداف مأموريت و سپس کمک و اقدام مستقيم براي دسترسي به موقع به اهداف، به کمک اپراتورها خواهند آمد. بعضي از اين عوامل هوشمند بر گرفته از مدل رفتاري انسان ميباشد؛ يعني اين الگوريتمها در تلاشند تا رفتاري مشابه و تقليدي از انسان مثل چگونگي مشاهده و درک انسان و فکر و عمل آن در محيط بيرون انجام دهند. اين موضوع واقعاًً يک عامل انساني نيست؛ اما در عوض مدل روانشناختي در درون ماشينهاي مهندسي را معرفي مينمايد. عوامل انساني نقش خود را هنگاميکه بحث وارد رفتار متقابل بين اپراتور و IAI ميگردد، بيشتر نشان ميدهند. در انتها ميتوان هر دو اپراتور و IAI را به عنوان عوامل هوشمند مدلسازي نمود که اطلاعات را از دنياي بيرون گرفته و پايداري رفتار متفاوت بين خودشان را ميتوان با روشهاي تئوريک کنترل استاندارد (FARRELL) تحليل و بررسي نمود. وسايل بدون سرنشين مستقل و چند منظوره، مهندسان و محققان را تحريک نمودهاند تا فلسفهي رفتارهاي متقابل انساني با سيستمهاي هوشمند را مورد بحث و بررسي قرار دهند. مطالعهي معروف به "اعتماد به فرايند استقلالسازي وسايل بدون سرنشين " که توسط TIF در تابستان 2004 شروع شده است، در حال تحليل و بررسي کنترل وسايل بدون سرنشين چند منظوره بر مبناي محدوديتهاي زماني است. حتي امروزه نيز مفهوم روباتهاي مستقل و انطباقي امدادگر (ACAR ) در CFEC، به عنوان پروژهي تحقيقي آينده شناخته شدهاند. گروهي کردن وسايل بدون سرنشين عاملي خواهد بود براي تحقيق و بررسي تأثيرات اخلاقي، اجتماعي، منطقي و احساسي سيستمهاي بدون سرنشين خود مختار و مستقل.

به خاطر رشد نرم افزارهاي هوشمند، تحقيقات مربوط به عوامل انساني نيازمند تمرکز بر روي فلسفهي روابط متقابل بين انسانها و سيستمهاي هوشمند ميباشد. البته در بعضي مواقع لازم است که سؤالات فلسفي هم مطرح شوند چرا که در خلال جوابها است که ممکن است چگونگي طراحي نسلهاي بعدي وسايل بدون سرنشين مشخص گردد. آيا يک ماشين ميتواند مسؤوليتي را بپذيرد ؟ آيا يک ماشين تاکنون توانسته است از قوانين اجتماعي آدمها پيروي کند که بتواند با موفقيت در درون اجتماع جايگاهي براي خود بيابد ؟ چگونه يک شخص ميتواند ماشيني که هيچ درکي از مفاهيم درست و غلط را نداشته، تحت تعقيب قرار دهد ؟ تأثيرهاي اخلاقي، منطقي و اجتماعي ماشينهاي هوشمند خودمختار بر روي جامعه کدامند ؟ شايد مفهوم اساسي اکثر سؤالات مطرح شده اين باشد که چگونه دولتها و ارتشهاي جهان ميتوانند از خود در برابر ماشينهاي مستقل هوشمند دفاع کنند ؟
نتيجهگيري
با تغييرات چشمگير در حوزهي تکنولوژيک وسايل بدون سرنشين، ميبايست عوامل نيروهاي انساني را هم پابهپاي آنها مورد توجه قرار داد. در ابتدا ابعاد سنتي عوامل انساني در رابطه با طراحي رابط کاربر، کارآيي، بار کاري و ارگونوميک محيط کار مورد بررسي و تحليل قرار گرفت و سپس با به کارگيري سيستمهاي بدون سرنشين در عملياتهاي واقعي، موضوعاتي نظير ايمني و منابع انساني پررنگتر و بر جستهتر شدند. اکنون به خاطر وجود الگوريتمهاي عوامل هوشمند، عوامل نيروي انساني ميبايست تمرکز خود را بر روي روابط متقابل اين عوامل هوشمند و پويايي تيميمنتقل ساخته و به همان نسبت تأثير اخلاق، منطق و مسائل اجتماعي وسايل بدون سرنشين کاملاً مستقل را در نظر بگيرند.
منبع : موسسه خدمات فني و مهندسي رها